【開発事例紹介】コーナリングライト制御用 バンク角計測システムの開発
1.概要
本開発では、スクーターがカーブを曲がる際の車体の傾き(バンク角)を、素早く・正確に計測する方法の検討および開発をおこないました。 この情報をもとに、コーナリングライトを適切なタイミングで点灯させることをねらいとしています。
2. 目的
カーブ中の車体の傾きを、精度よく、かつ時間的な遅延を可能な限り減らして計測できるようにし、実力値の評価をおこなうことを目的としました。
3.開発品の構成
本件で開発した「バンク角計測システム」は、大きく分けて①車両に取り付ける計測装置、②PC上の解析ソフト・計算ロジックから構成されています。
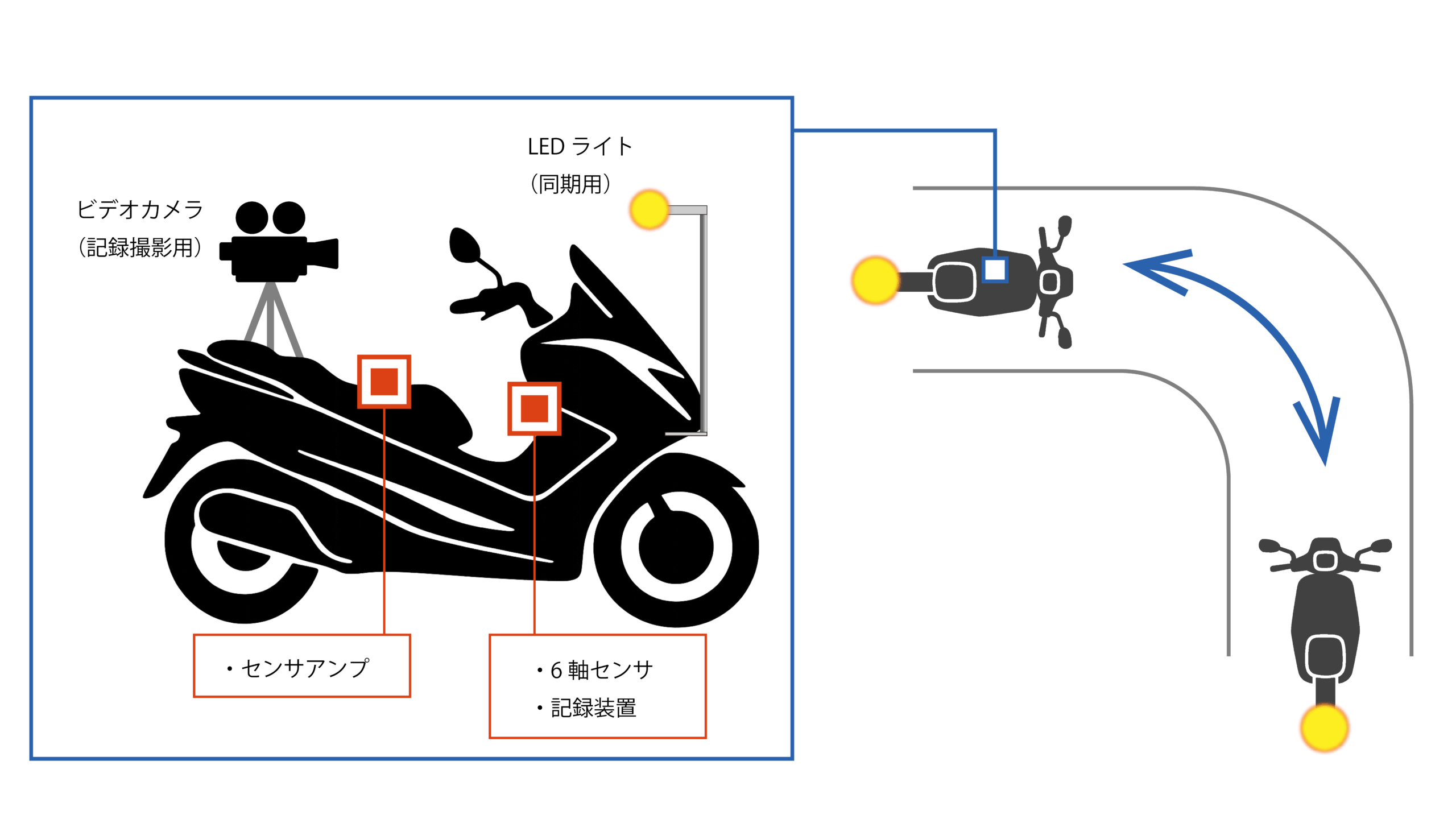
①車両に取り付ける計測装置- センサユニット
- 車体の「向きの変化」
- 上下・左右方向の「動き」
- 車速信号の取得
- どれくらいの速さで曲がっているか
- どの程度曲がっているか
- 記録装置・電源
車体の動きを測るための小型センサを車両の前方カウル部に取り付けました。
このセンサユニットでは、「加速度センサー」「角速度センサー(ジャイロセンサー)」を用いて、
をまとめて計測できるようになっています。
車両側のスピード信号(車輪の回転パルス)を記録装置に入力し、センサーの情報と同時に記録しました。これにより、
を合わせて評価できる構成としています。
センサの出力と車速信号を保存する専用の記録装置を、シート下付近に搭載しました。 バッテリーから安定して電源を供給し、走行中も連続してデータを記録できるようにしています。
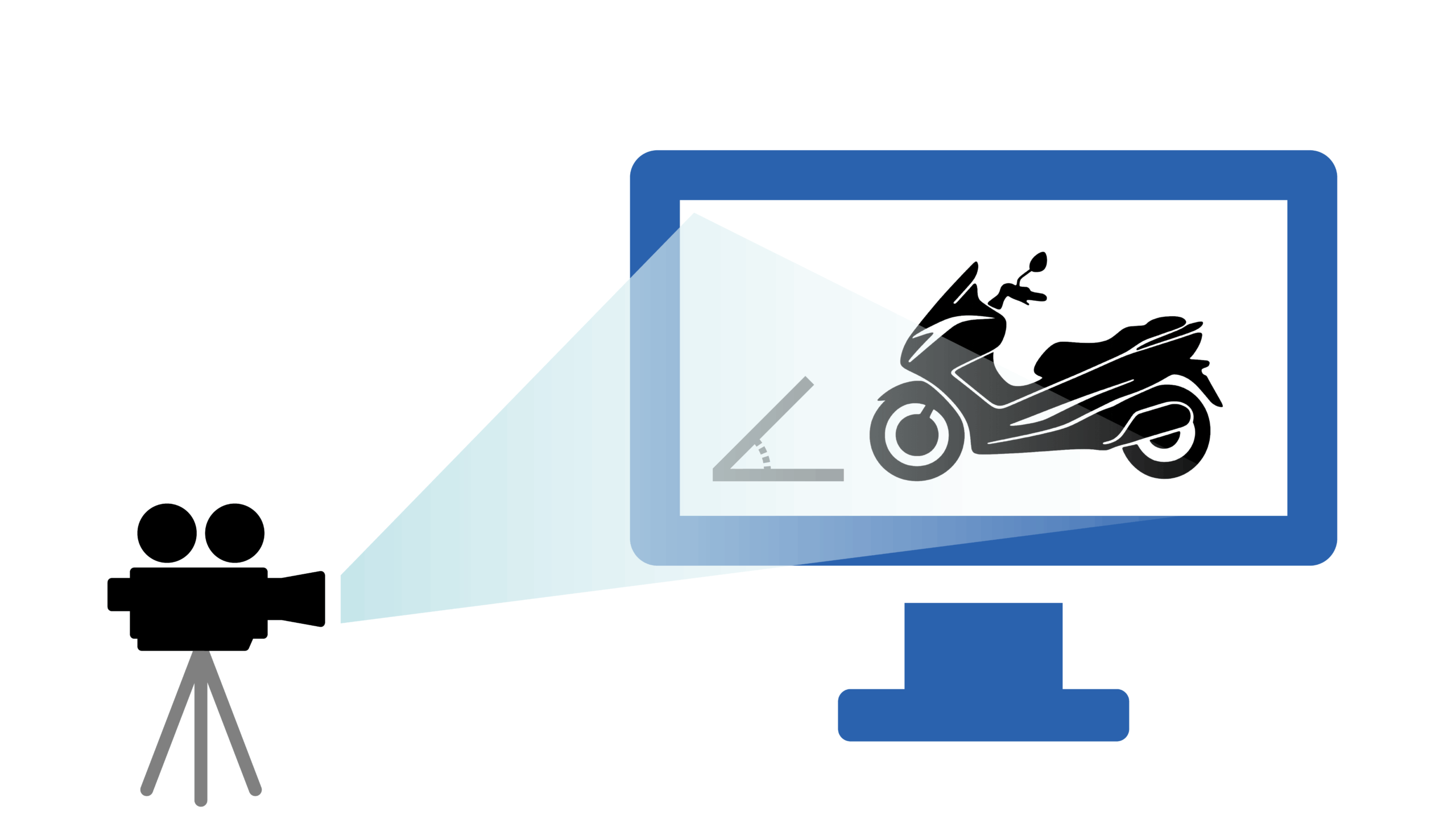
走行後、記録したデータをPCに取り込み、専用の解析ソフトで「車体の傾き(バンク角)」を計算しています。
4.開発成果
新たに考案した方式のうち、上記3の「車体の動き方をモデル化した計算方法(動的バンク角方式)」は映像から計算したデータと実際の傾きの値が近く、カーブ中の変化にも素早く追従できるという結果になりました。
5.結論、今後の課題
開発した時点では、精度・応答の速さ・安定性のバランスが最も良かった「動的バンク角方式」が採用候補になると考えています。 将来的にはこの方式を前提にしながら、できるだけ安価なセンサ構成を用いて実用化を目指します。